
Leandro Di Bella
3rd-year PhD student · ETRO, Vrije Universiteit Brussel (VUB)
Autonomous perception
Computer vision & generative AI for driving & drones.
I work on deployable perception systems with strong temporal consistency and practical robustness.
- Multi-object tracking: stable 3D MOT for autonomy.
- Vision-language: grounding & reasoning for perception.
- Forecasting: generative motion prediction in complex scenes.
Featured publications
All →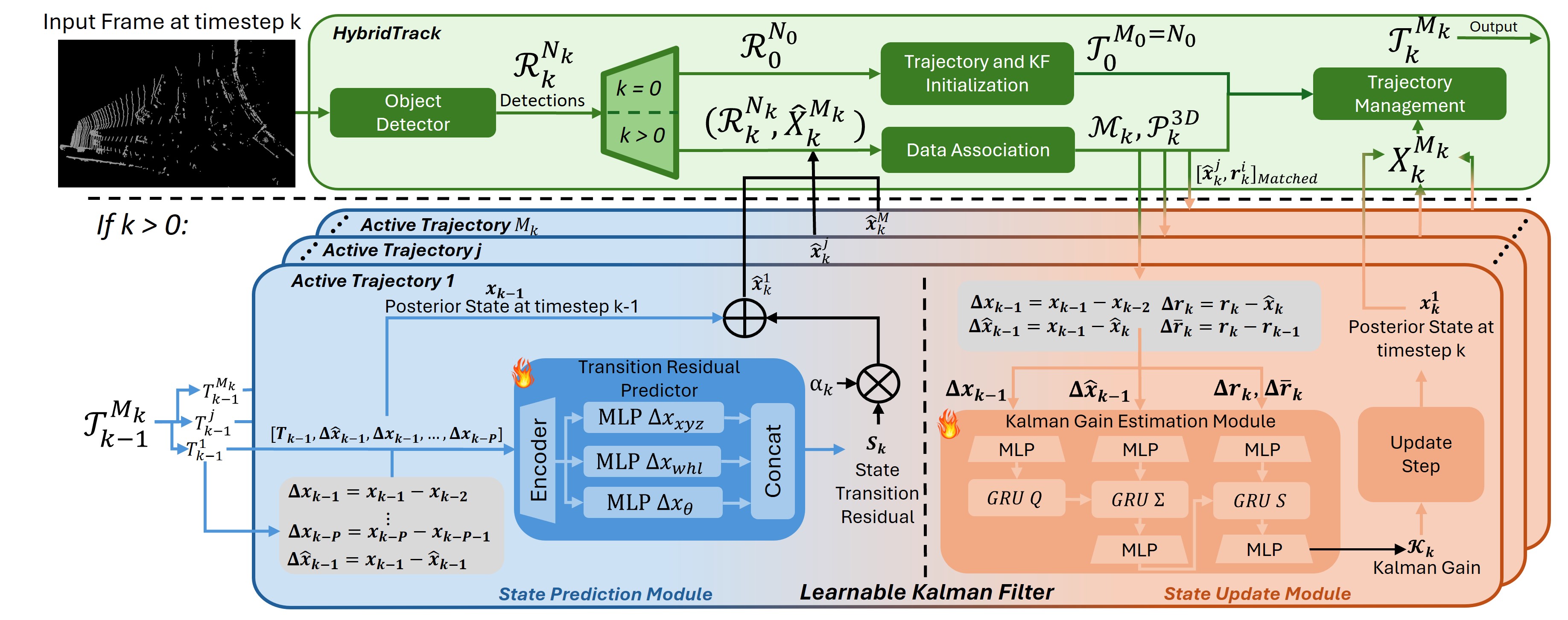 HybridTrack: A Hybrid Approach for Robust Multi-Object Tracking
HybridTrack: A Hybrid Approach for Robust Multi-Object Tracking 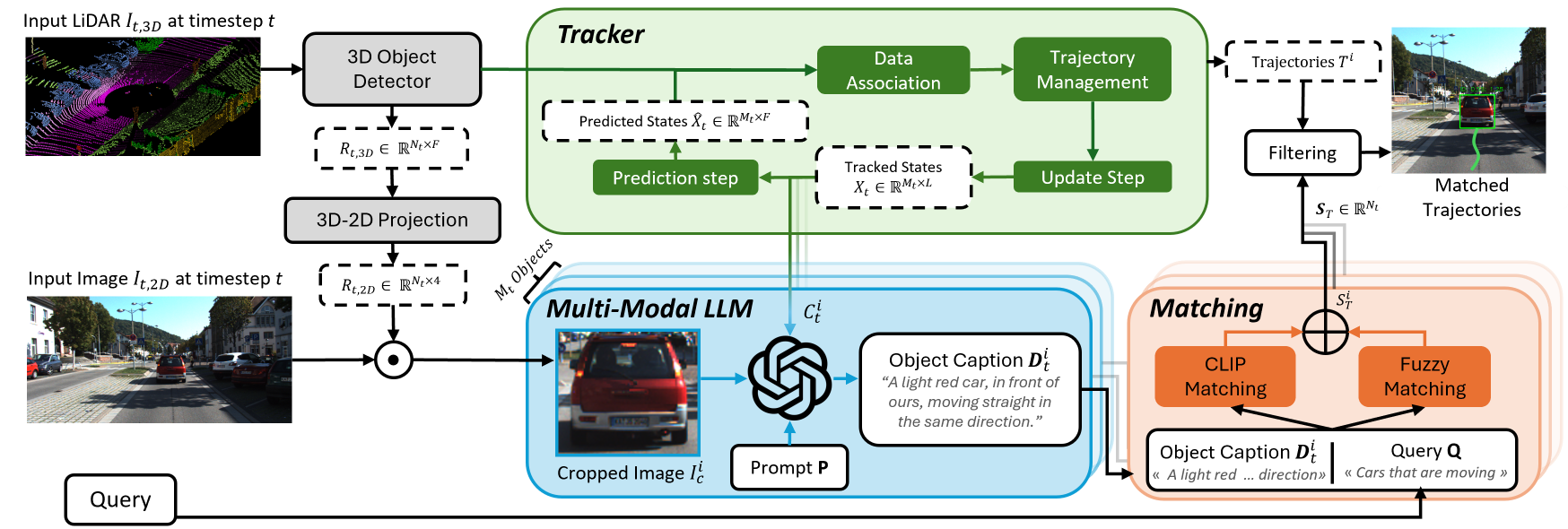 ReferGPT: Towards Zero-Shot Referring Multi-Object Tracking
ReferGPT: Towards Zero-Shot Referring Multi-Object Tracking 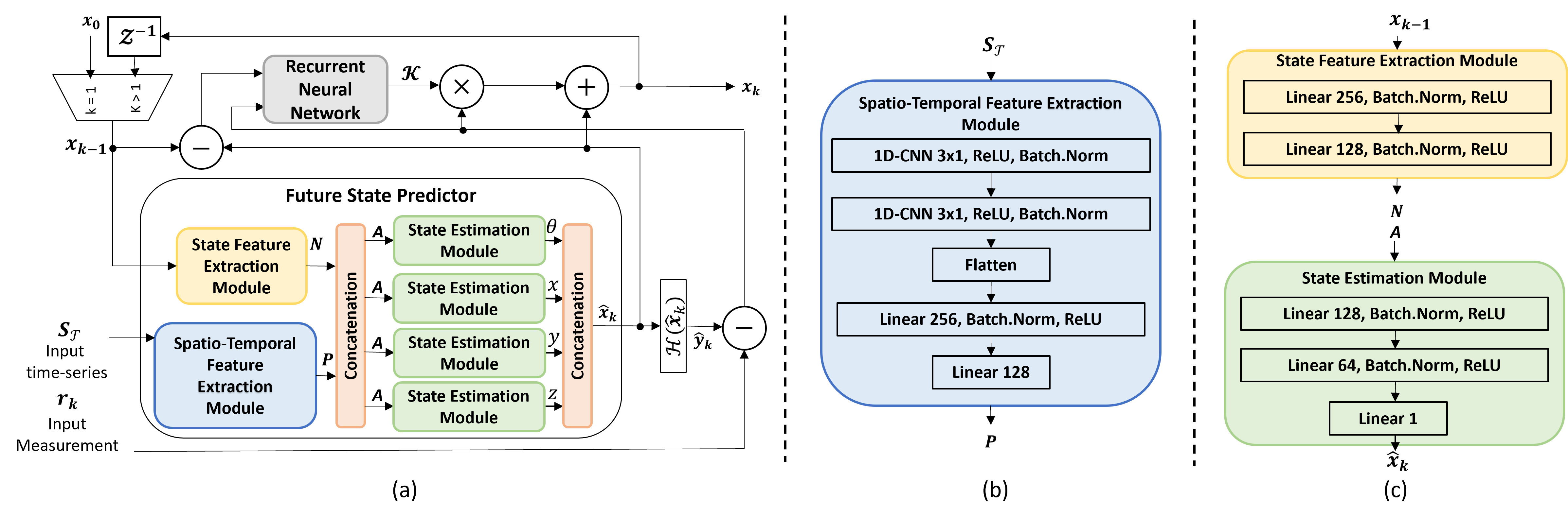 DeepKalPose: An Enhanced Deep-Learning Kalman Filter for Temporally Consistent Monocular Vehicle Pose Estimation
DeepKalPose: An Enhanced Deep-Learning Kalman Filter for Temporally Consistent Monocular Vehicle Pose Estimation 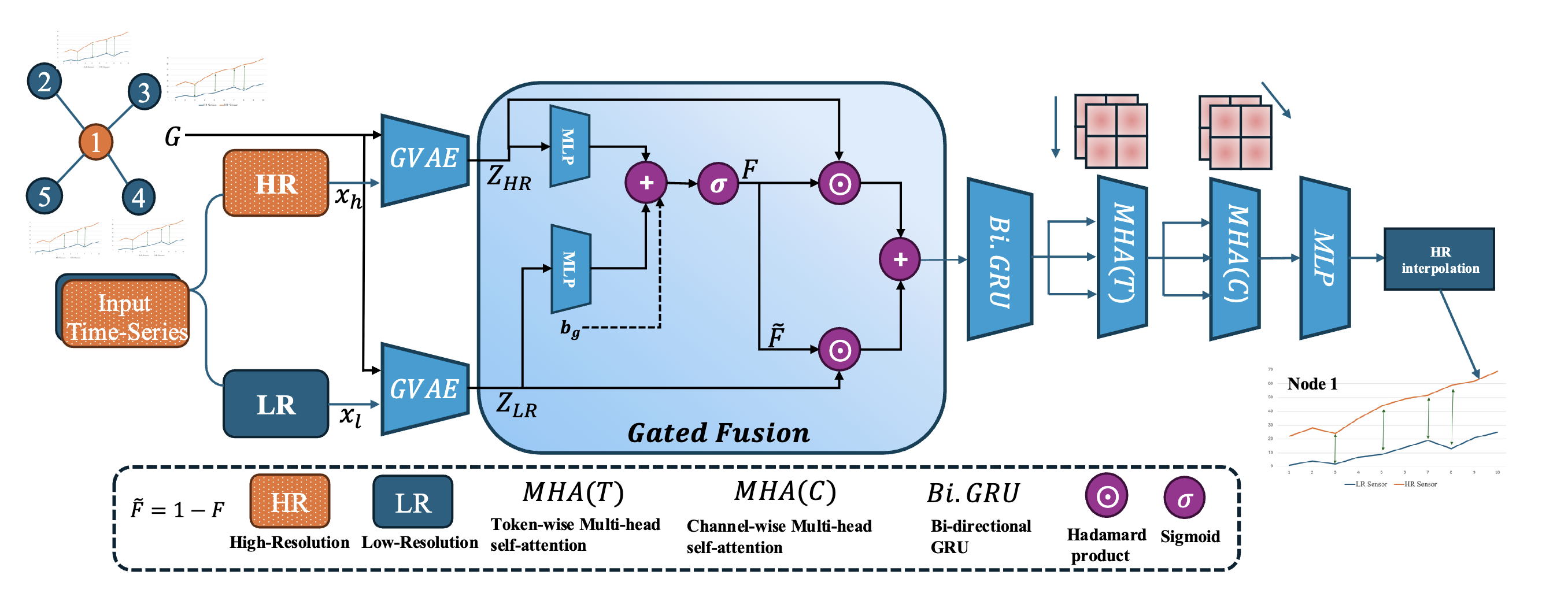 ChronoFusion: Spatio-Temporal Super-Resolution based on Graph VAEs and Gated Fusion
ChronoFusion: Spatio-Temporal Super-Resolution based on Graph VAEs and Gated Fusion What I work on
Current focus: real-time robustness, temporal consistency, and reliable behavior under distribution shift.
Personal project
mappx.app →Mappx
Map-centric social travel app (1000+ users).
Contact
Email →Open to full-time roles in Belgium’s research & engineering ecosystem.